Color detection
The BallCuber : 4x4x4 Rubik's Cube solving machine
Defining the 96 facets colors is possible by hand in the supervisor, but it is a very laborious task, as you can see :
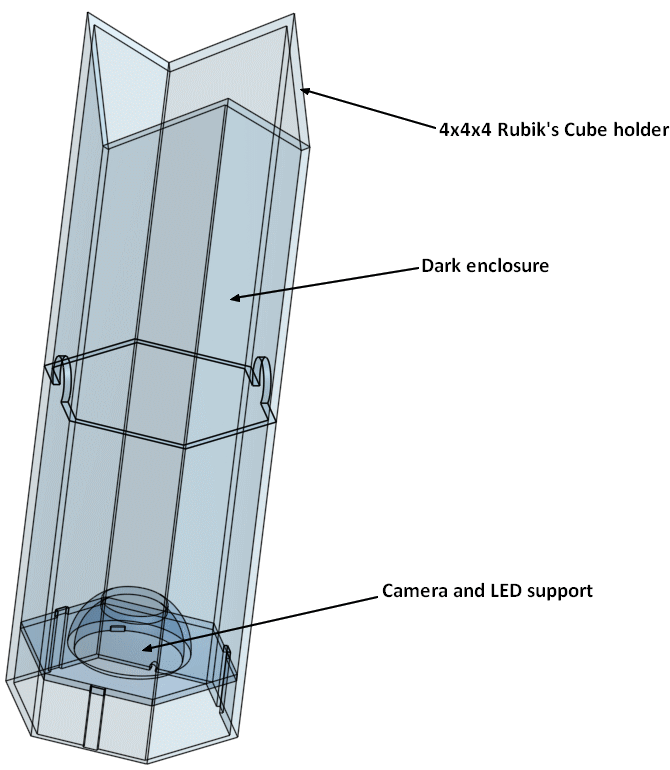
That’s why we decided to develop an automatic color detection with a camera. First, we want this to be independent of the robot in order not to disturb mechanical tunings. Moreover, image processing is very empirical and dependent of the brightness, so we have created a dark enclosure with controlled lightning and designed so that the camera can scan 3 faces at a time. Then, the cube is flipped in order to scan the 3 other faces. That’s why we decided to develop an automatic color detection with a camera. First, we want this to be independent of the robot in order not to disturb mechanical tunings. Moreover, image processing is very empirical and dependant of the brightness, so we have created a dark enclosure with controlled lightning and designed so that the camera can scan 3 faces at a time. Then, the cube is flipped in order to scan the 3 other faces. The camera is a low-cost 640x320 Logitech USB webcam, but it’s sufficient.



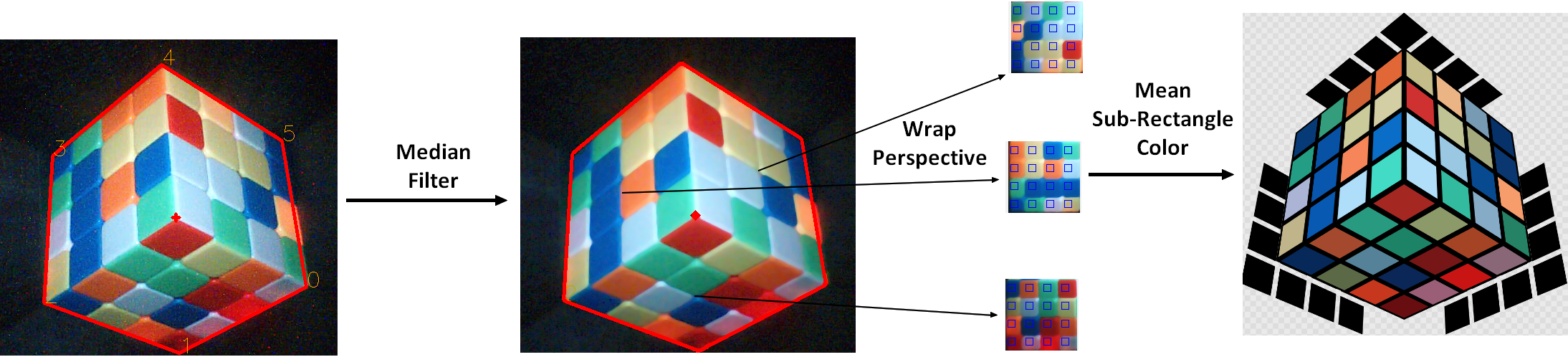
Capture and image processing are done with OpenCV, and more precisely a C# wrapper called EmguCV.
The image is captured, then the perspective of the 3 visible faces is projected so that it is possible to get the color of each 16 facets. This process is repeated after turning the cube to capture the 3 other faces.
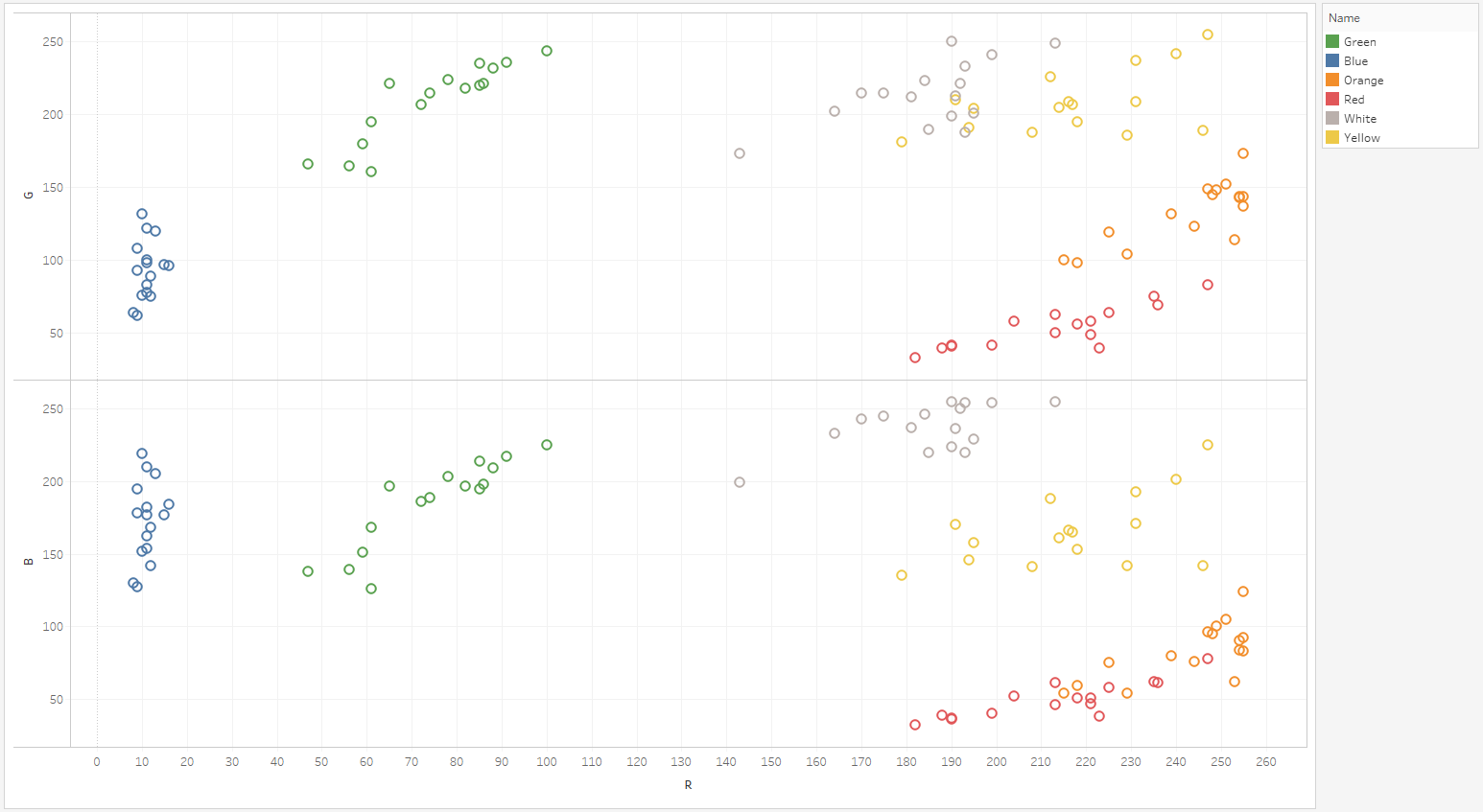
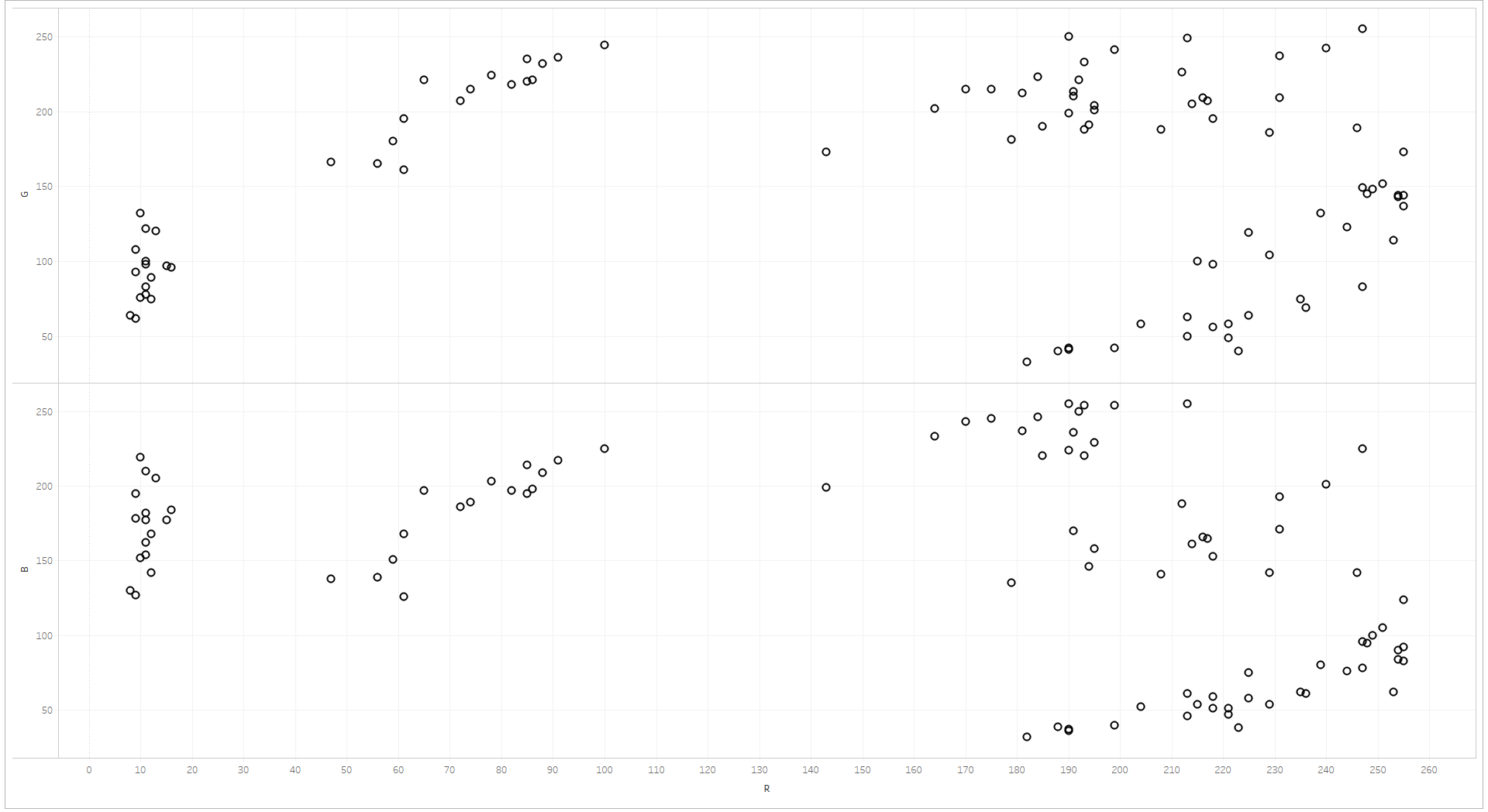
Mean RGB color of each facets are presented in this 2D scatter plot :
Here is how to read the color value of a point (A point appears both in RG and RB graph) :
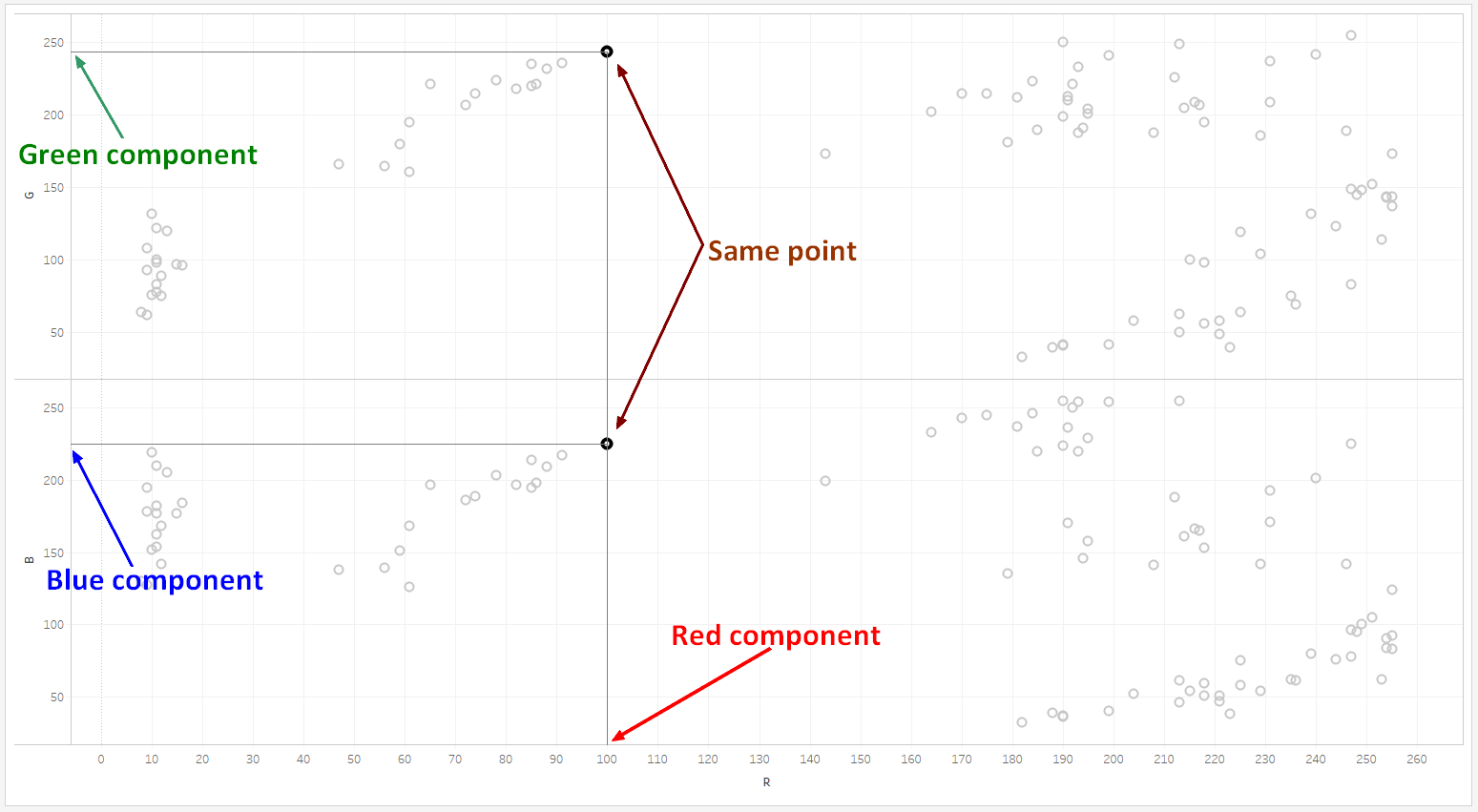
Color regions are not clearly separated, so we cannot apply a simple threshold on each RGB component to discriminate the real color. We will need a smarter algorithm.
The final algorithm works as following :
- The euclidean color distance between all points is calculated
- The 2 nearest points are selected and they now belong to the same group (face). A group is composed of 16 points. So, lets find the 14 others that also belong to this group.
- All points that still not belong to a group are browsed and the point with the smallest distance to the group now belong to the group.
- The distance between a point and a group is the smallest distance between this point and all group points.
- One the group has 16 points, we begin a new group by finding again the 2 nearest points among the remaining points, and calculating the distance between each point and the new group.
In the end, we now have 6 groups, but we still don’t know their color. We only know that they are the same color. So, we apply this rules :
- Blue group is the group with smallest red component
- Green group is the second one with smallest red component
- Red group is the remaining group with the smallest green component
- Orange group is the second remaining group with the smallest green component
- Yellow and white groups are discriminated by saying that yellow group has less blue component than white